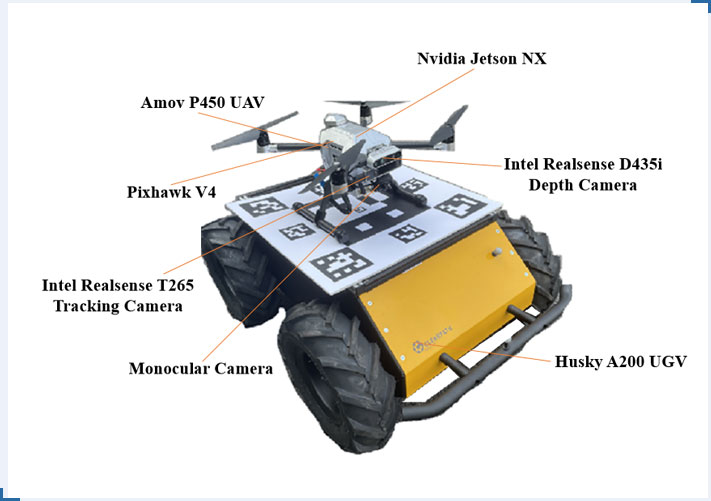
无人机和无人车的“空地协同”异构机器人系统
——深圳市机器人感知与智能重点实验室(筹建启动)
旨在研究一种由四旋翼无人机和无人车构成的异构机器人协同系统,该“空地协同”机器人系统分别结合无人车的大载重、长续航和四旋翼无人机的敏捷性、空间覆盖广等优点,可广泛用于生态资源监测、最后一公里物流配送、基建巡检等领域。在本项目中,无人机首先从无人车上起飞并执行拍照等监测任务;任务完成后无人机对无人车上的降落点进行定位并规划路径;最终无人机平稳降落在移动的无人车上并完成回收。主要研究内容包括:基于二维码的移动无人车平台定位系统,基于轨迹优化的无人机运动规划方法,基于串级PID的无人机控制方法等。