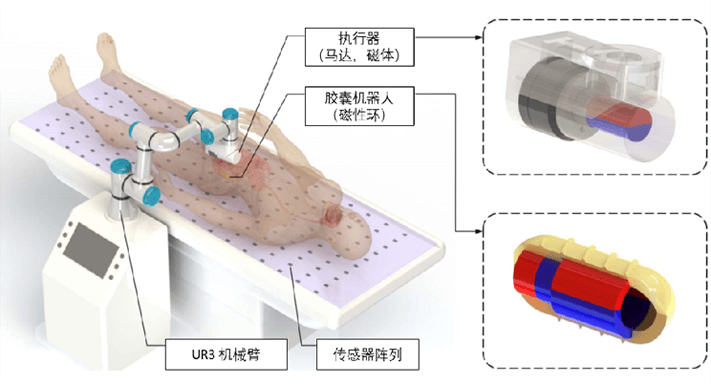
面向结肠检查的磁控主动胶囊机器人系统
——深圳市机器人感知与智能重点实验室(筹建启动)
结肠疾病,尤其是结肠癌,一直在世界范围内影响着人类的健康,同时目前国内医疗机器人的产品尚未成熟,产量很少,而国外的相关产品价格昂贵,与我国医院现有的医疗条件、购买能力以及病人的经济承受能力均不相适应。
本课题基于图像信息和磁轨迹信息融合的相对定位技术,旨在智能识别出结肠内的生物解剖界标,并计算出胶囊和临床诊断时发现的病变区域相对于大肠内生物解剖界标的相对距离,然后实时将胶囊和病变区域在结肠三维模型中的位置直观地展现给医生,方便医生根据病变区域的相对定位信息做出下一步诊疗方案,有利于结肠检查普及、早期诊断,可提高肠病患者的生活质量和结肠癌患者的成活率。加之与传统检查手段相比所具有的优势和特点,研制面向结肠癌检查的磁控胶囊机器人系统必将成为战略性新兴产业,形成结肠检查内窥镜高端医疗设备自主创新研发与产业化能力,服务“高、精、尖”科技创新和产业发展布局,成为新的国民经济增长点,创造巨大的经济效益。本课题作为磁控主动胶囊机器人系统项目的重要组成部分,面向结肠检查的临床需求,具有显著的高科技特点,为项目的顺利实施奠定了基础。